Boids: WebAssembly and Golang
The goal for this project was to try out Web Assembly (WASM). Having recently learnt a bit of golang for work and out of personal interest I decided a good foray into WASM would be to make a quick write up of boids in golang, compile it to WASM, and render the boids using javascript (I went with the p5js framework for the animation).
Have a play around with a demo of the boids here!
Or check out the source code for the project here
I’ve made the boids afraid of the mouse, which is a fun way of interacting
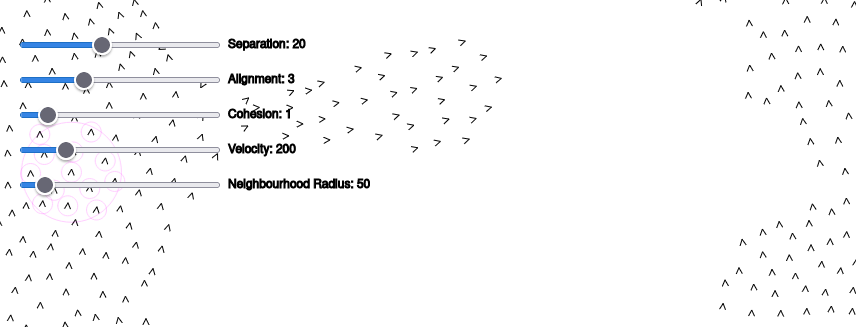
I also set up some sliders to allow you to configure the different boid parameters:
- Separation: How strongly the boids repel away from each other.
- Alignment: How strongly the boids want to fly in the same direction.
- Cohesion: How strongly the boids want to group together.
- Velocity: With this implementation of boids I opted to go with a simplified rule acceleration aggregation method - where all rules accelerations are added to the velocity vector, then the vector is normalised, so all boids have a constant velocity. This parameter sets that constant velocity value.
- Neighbourhood Radius: The simulated vision of a boid, only boids at least this close will be considered “neighbours” and be used for evaluating the flocking behaviours.
And to get a little look under the hood I’ve added in a debug boid (I actually used this for debugging but thought it was quite cool so kept it). This boid has a large purple circle around it indicating it’s neighbourhood, and any boid in that neighbourhood is also indicated by a smaller surrounding purple circle.
Future work
The next steps I would take on this project would be:
- Add a slider for number of boids, allowing the user to see what their machine can handle!
- Use a spacial grid to lower the time complexity of the boids update. The current implementation is O(n^2) as we loop over each boid when determining a boids neighbour - this could be significantly reduced by partitioning the boids by their position in a grid on the screen and only looping through relevant boids. That would reduce the average case, but the worse case time complexity would still be O(n^2).
- Make it 3D. That would be fun, and I might do it further down the line if I want to look into web graphics engines.
- Add predators, or static objects that the boids avoid (other than the mouse).